Part 7 : Simulation of an Artificial Life Form in a 2d environment
7.1. Artificial Life Form : Simulation
Click "Start" button to start simulation.
The blue coloured object is the Artificial Life Form , situated in a 2d environment with gray coloured walls on each side. The green boxes represent Food.
In this simulation, to simulate energy expenditure of the Artificial Life Form, energy-level is designed to decrease by 10 units for every 20 epochs.
When food is eaten, food-level increases by 20 units.
The DIGEST motor action decreases food-level by 10 units and increases energy-level by 10 units.
When energy level reaches 0, Alfie dies.
More details in section 7.2 below.

The blue coloured object is the Artificial Life Form , situated in a 2d environment with gray coloured walls on each side. The green boxes represent Food.
In this simulation, to simulate energy expenditure of the Artificial Life Form, energy-level is designed to decrease by 10 units for every 20 epochs.
When food is eaten, food-level increases by 20 units.
The DIGEST motor action decreases food-level by 10 units and increases energy-level by 10 units.
When energy level reaches 0, Alfie dies.
More details in section 7.2 below.
7.2. Detailed description of the simulation
7.2.1. Virtual Environment
- To illustrate the concepts in a simple manner, a simple two-dimensional virtual environment is used as the location of the "Artificial Life Form".
- The Artificial Life Form, which we'll call Alfie , is represented by the pointed blue coloured shape.
- The two-dimensional environment is the white-coloured area and has gray coloured walls on each side.
- Food placed in this environment is represented by green coloured squares.
7.2.2. Sensory Information
The 'body' of the Alfie is simulated such that it has a 1-pixel colour sensor "eye" at its pointed end. Based on the alignment of Alfie's body, the 1-pixel colour sensor receives light corresponding to what the Alfie "sees". The colour actually seen by the Alfie's eye is shown in the top left of the simulation UI in the box corresponding to "Colour seen". The 'body' of the Alfie is simulated such that it also has a "touch sensor" at its pointed end.
The "brain" of the Artificial Life Form receives the values of the following six sensory stimuli every epoch :
- Red intensity level : This stimuli represents the red intensity level of the incoming light pixel . (Intensity range : 0 to 255)
- Green intensity level : This stimuli represents the green intensity level of the incoming light pixel . (Intensity range : 0 to 255)
- Blue intensity level : This stimuli represents the blue intensity level of the incoming light pixel . (Intensity range : 0 to 255)
- Touch : When Alfie collides with the wall, a TOUCH sensor in its pointed end is activated. ( Intensity range : { 0,1} )
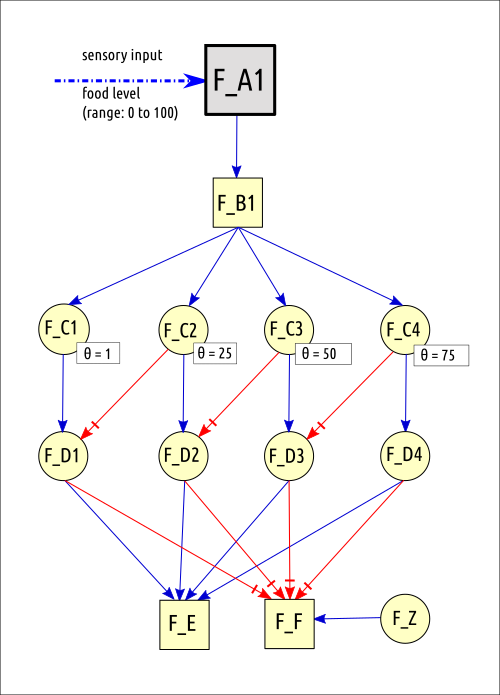
- Food level : This internal sensory stimuli indicates the level of food in Alfie's stomach. ( Intensity range : { 0,1,..100} )
- Energy level : This internal sensory stimuli indicates Alfie's energy level. The DIGEST motor action converts FOOD to ENERGY when energy level is low and food is available. Energy level decreases by 10 units every 20 epochs. When energy level reaches 0, Alfie dies. ( Intensity range : { 0,1,..100} )
Note:
- The Red, Blue, Green sensory signals and the TOUCH sensory signal are external stimuli arriving to Alfie's brain, while the remaining stimuli (Food level,Energy level) are internal stimuli.
- The intensity of the above 6 variables are available to Alfie in a continuous datastream.
- A snapshot of the datastream is taken every epoch(300millisec) and Alfie's brain receives that snapshot of intensity values every epoch.
- In this simulation one epoch is approximately 300 milliseconds.
7.2.3.Motor actions
- FORWARD , which makes it move forward by 10 units
- ROTATE_RIGHT , which makes it rotate right from its current orientation by 90 degrees.
- DIGEST motor-action is also present, but this action cannot be initiated voluntarily by Alfie, but only by its autonomous-subsystem.
7.2.4. Autonomous subsystems
An autonomous subsystem is designed for 'virtual digestion' of the food eaten by Alfie.
The autonomous subsystem is required to generate and manage internal stimuli such as food level,energy level,etc.
(The need for autonomous subsystem is described in section 6.5)
This subsystem will perform the following functions :
• activate HUNGER when food level is low
• trigger DIGEST motor action when EnergyLevel is less and food is available
• inhibit HUNGER when FOOD level is maximum
7.2.5. List of Neurons
| Neuron Category | Neuron names |
| Neurons for incoming stimuli with non-binary values ( 65 ) |
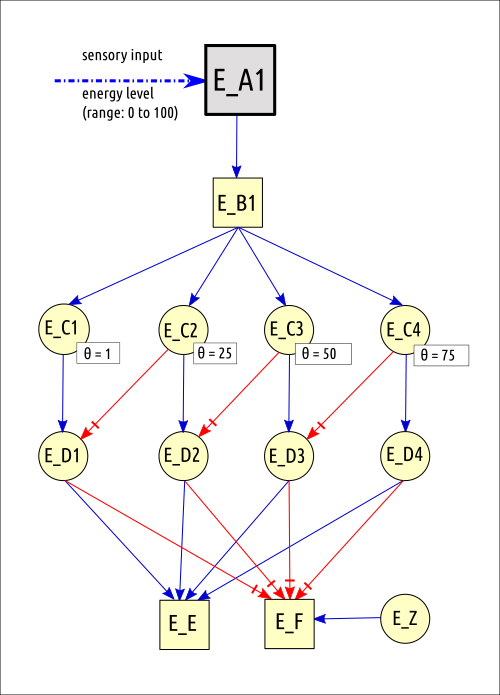
Red, Green & Blue sensory input stimuli have an input intensity range of ( 0 to 255 ). Food-level & Energy-level input stimuli have an input intensity range of ( 0 to 100 ). For each of these stimuli, we need to detect their approximate intensity using an intensity detection circuit. An intensity detection circuit that groups incoming values into four "range buckets" will have 13 neurons. So, for five input stimuli, the total number of neurons = 5 * 13 = 65 neurons. (See section 7.2.6 for details of each intensity detection circuit) RED intensity detection circuit has the following neurons : R_A1,R_B1,R_C1,R_C2,R_C3,R_C4,R_D1,R_D2,R_D3,R_D4,R_E,R_F,R_Z GREEN intensity detection circuit has the following neurons : G_A1,G_B1,G_C1,G_C2,G_C3,G_C4,G_D1,G_D2,G_D3,G_D4,G_E,G_F,G_Z BLUE intensity detection circuit has the following neurons : B_A1,B_B1,B_C1,B_C2,B_C3,B_C4,B_D1,B_D2,B_D3,B_D4,B_E,B_F,B_Z FOOD intensity detection circuit has the following neurons : F_A1,F_B1,F_C1,F_C2,F_C3,F_C4,F_D1,F_D2,F_D3,F_D4,F_E,F_F,F_Z ENERGY intensity detection circuit has the following neurons : E_A1,E_B1,E_C1,E_C2,E_C3,E_C4,E_D1,E_D2,E_D3,E_D4,E_E,E_F,E_Z |
| Neurons for incoming stimuli with binary values as input ( 1 ) |
TOUCH |
| Neurons for derived data ( 4 ) |
ONLY_RED ONLY_BLUE ONLY_GREEN ONLY_YELLOW |
| Motor action neurons ( 3 ) |
FORWARD
ROTATE_RIGHT DIGEST |
| Motivation circuit neurons ( 7 ) |
PAIN HUNGER DECISION DECISION_B1 DECISION_B2 ROTATE_RIGHT_DECISION FORWARD_DECISION |
TOTAL NEURONS = (65 + 1 + 4 + 3 + 7) = 80 neurons.
7.2.6. Connecting neurons to create desired behaviour
Note: In the neural circuit diagrams below, unless specified otherwise, all connections are t+1 connections ;
inhibitory connection weights are -1.0 ; excitatory connection weights are 1.0 ; neuron thresholds are 1.0
inhibitory connection weights are -1.0 ; excitatory connection weights are 1.0 ; neuron thresholds are 1.0
| 1. Intensity detection circuits for detecting intensity level of red/green/blue in incoming light pixel | |||||||||||||||||||||||||||||||||||||||||||
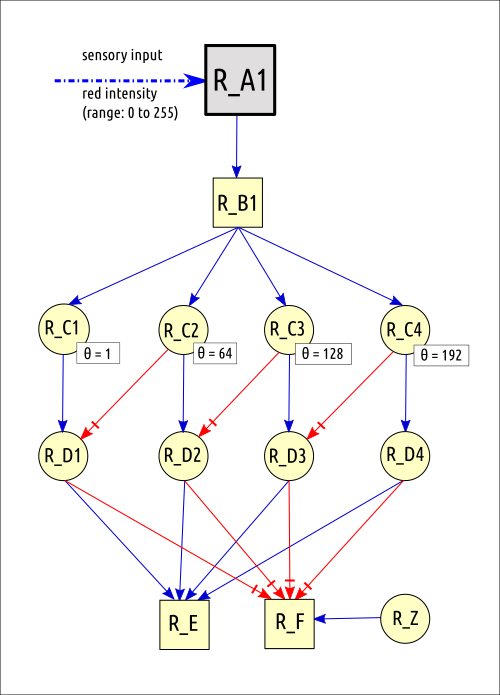
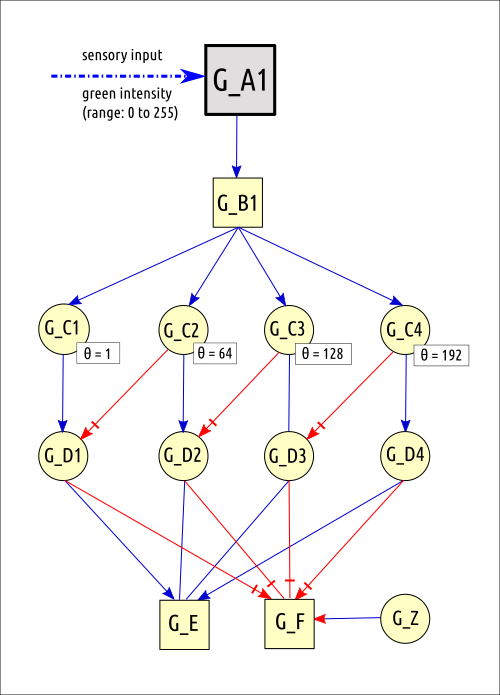
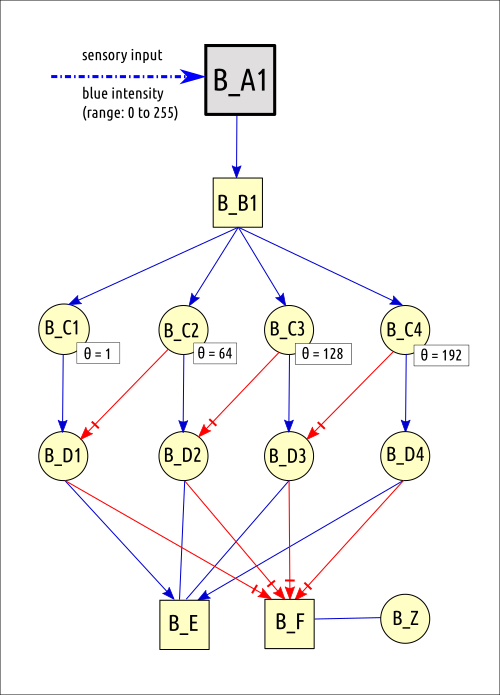
This intensity detection circuit is similar to the example seen in section 4.4. The consequence of this circuit is as follows:
|
|||||||||||||||||||||||||||||||||||||||||||
| 2. Intensity detection circuits for detecting Food-level and Energy-level | |||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||
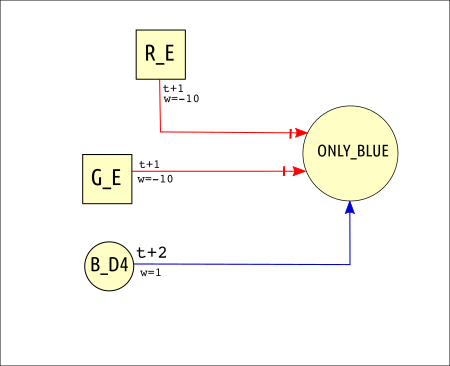
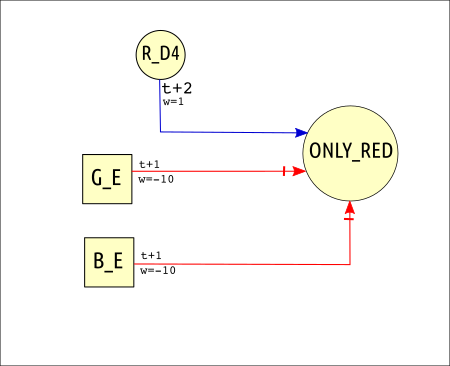
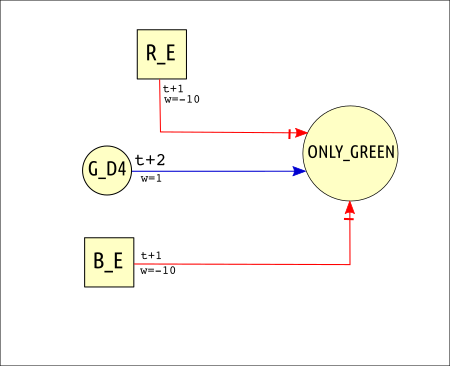
| 3. Colour detection circuits to detect strong levels of RED,BLUE,GREEN and YELLOW colours | |||||||||||||||||||||||||||||||||||||||||||
|
• When Red and Green are at maximum levels, and Blue is zero, then ONLY_YELLOW is activated • When Red is at maximum level, Green is zero and Blue are zero, then ONLY_RED is activated • When Blue is at maximum level, Red is zero and Green are zero, then ONLY_BLUE is activated • When Green is at maximum level, Red is zero and Blue are zero, then ONLY_GREEN is activated 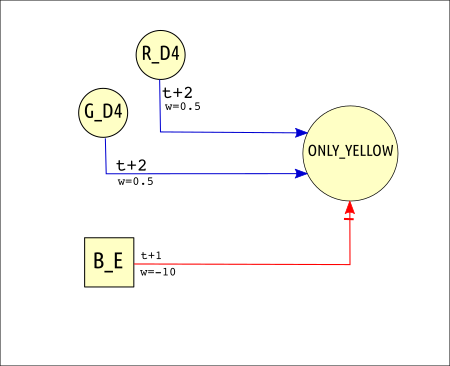
|
|||||||||||||||||||||||||||||||||||||||||||
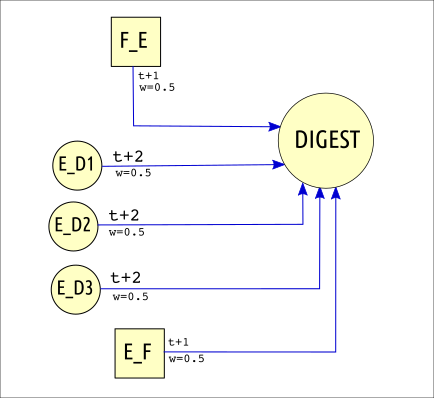
| 4. Hunger and digestion circuits | |||||||||||||||||||||||||||||||||||||||||||
|
• When Food is at maximum(F_D4), then HUNGER is inhibited. If Food is zero(F_F) or Food is low(F_D1,F_D2,F_D3) , then activate HUNGER neuron. • If (Energy i is zero(E_F) or Energy is low(F_D1,F_D2,F_D3) ) AND Food >0 (F_E), then activate DIGEST neuron. 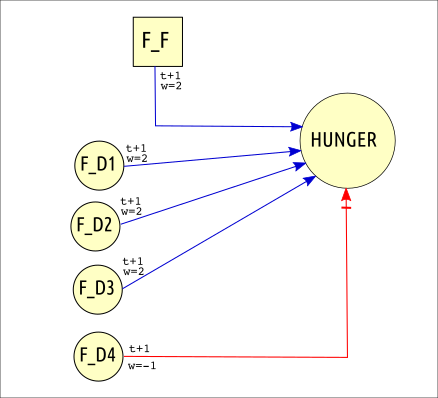
|
|||||||||||||||||||||||||||||||||||||||||||
| 5. Food-seeking innate connection and Touch reflex | |||||||||||||||||||||||||||||||||||||||||||
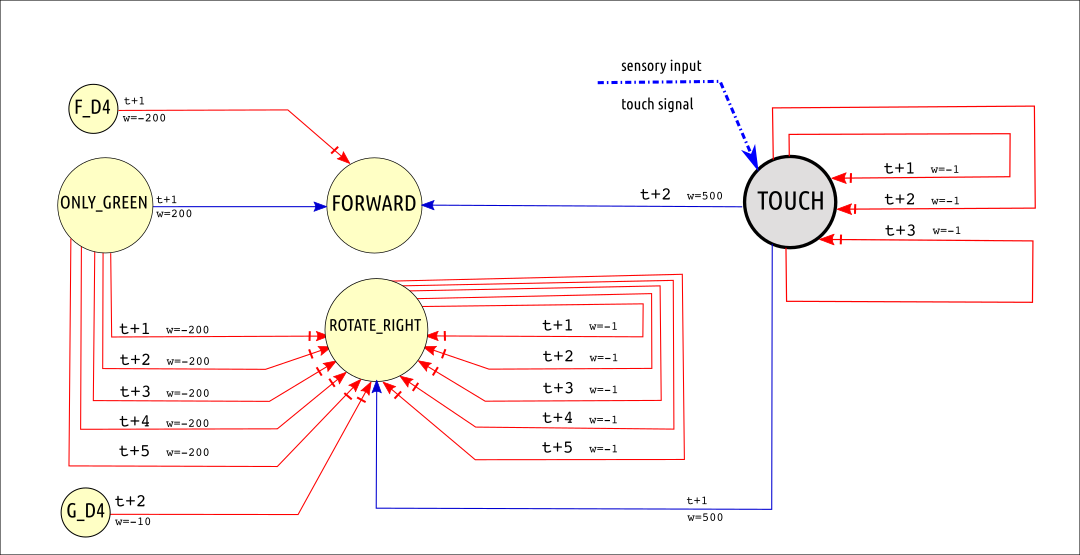
Behaviour created by this neural circuit : • Temporally sharpen TOUCH input signal, ie., avoid continous excitation, just fire once and inhibit immediate self-excitation • If TOUCH detected, then rotate-right only once and then go-forward once. • Avoid rotating repeatedly, limit consecutive rotations • If colour seen is pure GREEN (food) , then send a very strong signal to move forward and inhibit rotate_right strongly for the next few timesteps. • Prevent rotate right at same time as ONLY_GREEN fires |
|||||||||||||||||||||||||||||||||||||||||||
| 6. Motivation and Decision circuit | |||||||||||||||||||||||||||||||||||||||||||
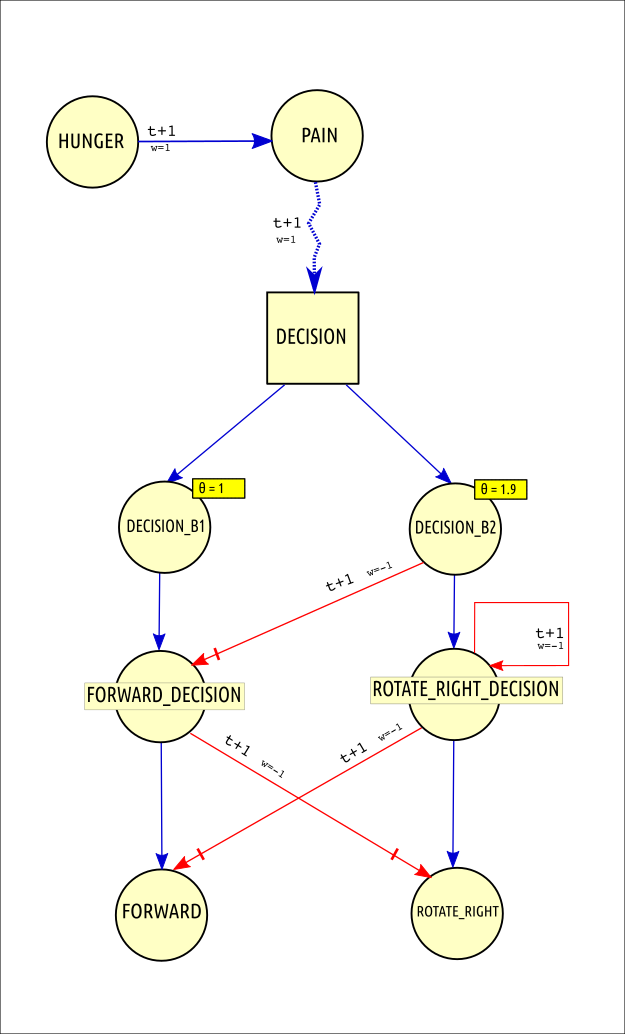
Behaviour created by this neural circuit : • When Food level is less than 75, one of F_D1, F_D2 or F_D3 neurons is activated, triggering HUNGER neuron activation. • HUNGER neuron which inturn activates PAIN neuron • PAIN neuron then activates the DECISION neuron with a fluctuating random weight, resulting in an input to DECISION neuron of between 1.0 to 2.0 • The output from DECISION neuron is sent to DECISION_B1 and DECISION_B2 neurons. DECISION_B1 fires if threshold 1.0 is crossed,and DECISION_B2 fires only if a higher threshold of 1.9 is crossed. • This creates the probability of DECISION_B1 firing 90% of the time and DECISION_B2 firing 10% of the time. • In this particular environment, moving forward 90% of the time provides a higher survival advantage compared to moving forward 50% of the time, that is the reasoning behind assigning threshold 1.9 for DECISION_B2 neuron. • Since DECISION_B1 triggers FORWARD motor action and DECISION_B2 triggers ROTATE_RIGHT motor action, FORWARD motor action is 90% likely to be activated, and ROTATE_RIGHT motor action is 10% likely to be activated. • So finally, depending on whether FORWARD or ROTATE_RIGHT is activated, Alfie moves or rotates accordingly. |
|||||||||||||||||||||||||||||||||||||||||||
7.2.7. Observed behaviour in this simulation
| No. | Scenario | Resultant behaviour |
| 1 | Click "Yellow light flash" button to shine yellow light in the Alfie's eye. |
The visual sensor receives yellow light ie., (R_A1=255, G_A1 = 255, B_A1=0)
This triggers the yellow-colour detection circuit and causes ONLY_YELLOW neuron to be activated after a few epochs and the ONLY_YELLOW neuron flashes in the UI |
| 2 | Click "Blue light flash" button to shine blue light in the Alfie's eye. |
The visual sensor receives blue light ie., (R_A1=0, G_A1 = 0, B_A1=255)
This triggers the blue-colour detection circuit and causes ONLY_BLUE neuron to be activated after a few epochs and the ONLY_BLUE neuron flashes in the UI |
| 3 | Click "Place food" button to place green coloured food in a random place in the environment. Repeat this so that Alfie eats more food ,until foodlevel > 100 and energylevel > 100 |
When FoodLevel is high, it inhibits the HUNGER neuron.
This in turn inhibits PAIN, which inturn inhibits the DECISION neuron from firing. So Alfie just stays where it is, unmotivated and idle ; Until energy level and food level drops over the next dozen epochs. |
| 4 | Click "Lights off" radio button. This prevents any light from reaching eye, RGB values in incoming datastream will be zero | Alfie explores environment even if it is dark. But less likely to survive in the dark due to inability to see GREEN coloured food and move forward towards it. |
| 5 | Alfie sees green coloured food | When Alfie sees green coloured food , the input ( R_A1=0, G_A1=255, B_A1=0 ) is sent as visual input. The ONLY_GREEN neuron is activated after a few time steps, which inturn strongly triggers FORWARD motor action and strongly inhibits ROTATE_RIGHT motor action Alfie keeps moving until it collides with the food and consumes it. |
| 6 | Alfie hits wall | TOUCH neuron is activated (just) once. The TOUCH neuron activates ROTATE_RIGHT motor in the next timestep and FORWARD motor action in the second timestep. |